




ຄູ່ຕາໜ່າງຂອງເກຍໜອນແບບໝູນວຽນ ແລະ ເກຍກ້ຽວແບບໝູນວຽນໄດ້ຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງໃນລະບົບສົ່ງກຳລັງຕ່ຳ. ຄູ່ຕາໜ່າງປະເພດນີ້ແມ່ນຂ້ອນຂ້າງງ່າຍຕໍ່ການອອກແບບ ແລະ ຜະລິດ. ໃນການຜະລິດ, ຖ້າຄວາມຖືກຕ້ອງຂອງຊິ້ນສ່ວນບໍ່ດີເລັກນ້ອຍ ຫຼື ຄວາມຕ້ອງການສຳລັບອັດຕາສ່ວນການສົ່ງກຳລັງບໍ່ເຂັ້ມງວດຫຼາຍ, ມັນກໍ່ເປັນວິທີການຄັດເລືອກທີ່ດີເຊັ່ນກັນ.
ໃນປະຈຸບັນ, ຄູ່ສົ່ງສັນຍານປະເພດນີ້ບໍ່ໄດ້ລວມຢູ່ໃນຂໍ້ມູນການອອກແບບທົ່ວໄປເນື່ອງຈາກທິດສະດີຂອງມັນຍັງບໍ່ທັນຄົບຖ້ວນ.
ຄູ່ຕາໜ່າງປະເພດນີ້ແມ່ນຄູ່ສົ່ງກຳລັງແບບຕິດຕໍ່ຈຸດທົ່ວໄປ. ຈາກທັດສະນະຂອງກ້ອງຈຸລະທັດ, ຄວາມກົດດັນໃນທ້ອງຖິ່ນແມ່ນສູງ ແລະ ປະສິດທິພາບແມ່ນຕໍ່າ. ໂຊກດີ, ແຮງບິດສົ່ງກຳລັງແມ່ນນ້ອຍ ແລະ ຄວາມຕ້ອງການດ້ານປະສິດທິພາບແມ່ນຕໍ່າ. ດັ່ງນັ້ນ, ມັນຈຶ່ງເປັນທີ່ຕ້ອງການຂອງຕະຫຼາດ. ການອອກແບບດັ່ງກ່າວຫຼີກລ່ຽງບັນຫາຕ່າງໆທີ່ມີຢູ່ໃນການຜະລິດ ແລະ ການປະກອບເກຍໜອນ.
ເອກະສານສະບັບນີ້ສ່ວນໃຫຍ່ແມ່ນປຶກສາຫາລືກ່ຽວກັບການນຳສະເໜີຄູ່ຕິດຕໍ່ປະເພດນີ້ທີ່ເຄື່ອນທີ່ໄປຕາມທິດທາງປົກກະຕິໃນລະດັບທີ່ນ້ອຍຫຼາຍໂດຍການໃຊ້ພາບເຄື່ອນໄຫວໃນທິດທາງທີ່ເຄື່ອນທີ່ຂອງຈຸດຕິດຕໍ່.
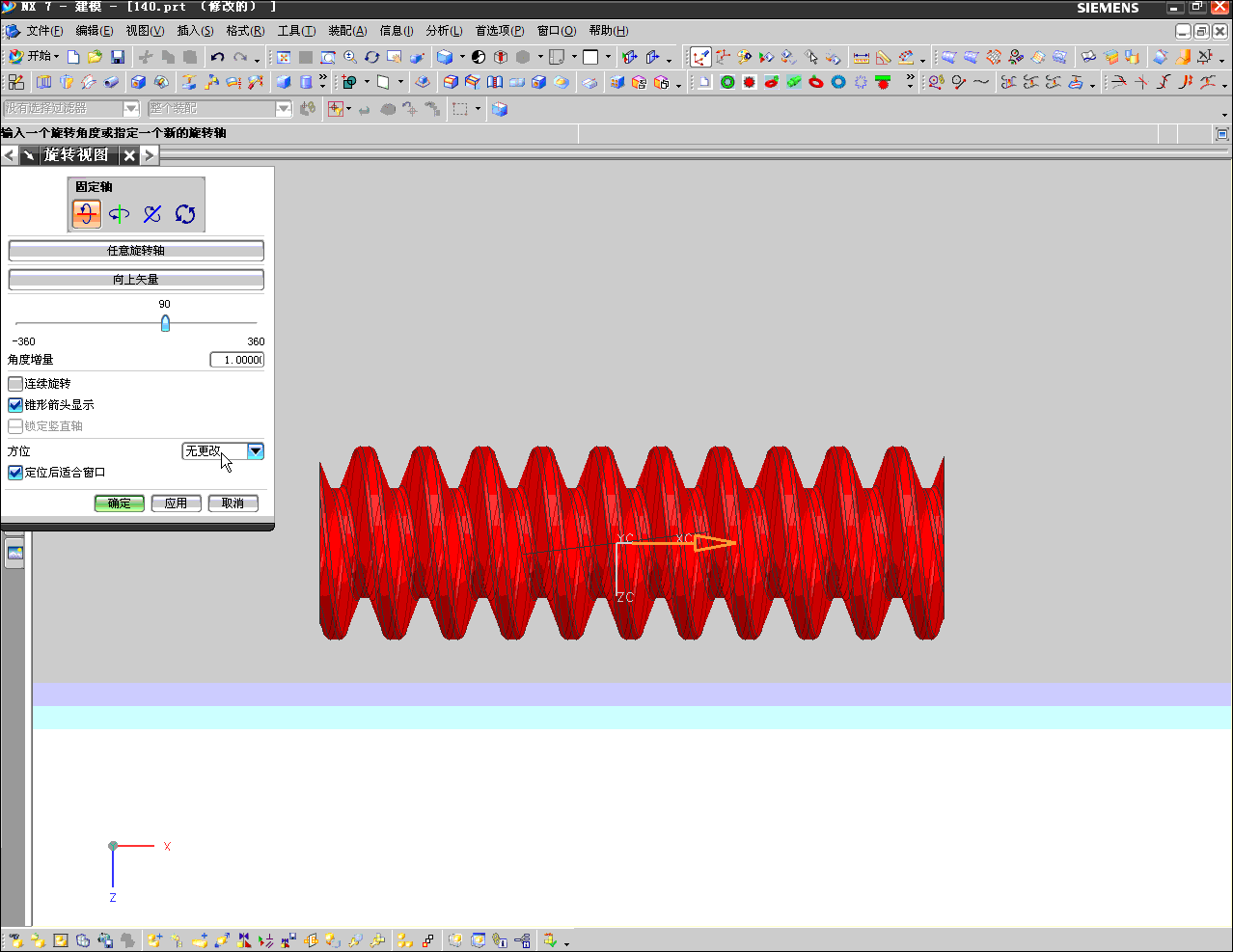
ສ້າງພື້ນຜິວຢູ່ພາກກາງຂອງຄູ່ຕາໜ່າງໃນຮູບແຕ້ມ, ແລະ ປະມວນຜົນມັນເປັນສີໂປ່ງໃສ ແລະ ກົງກັນຂ້າມໃນຮູບແຕ້ມ, ແລະ ຈາກນັ້ນປ່ອຍໃຫ້ມັນໝຸນມຸມທີ່ເພີ່ມຂຶ້ນຂອງໜອນອ້ອມຮອບເສັ້ນຕັ້ງຈາກຈຸດໃຈກາງເກຍໄປຫາໜອນ, ເຊິ່ງຕັ້ງຢູ່ທີ່ຕຳແໜ່ງຂອງພື້ນຜິວປົກກະຕິ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບຕໍ່ໄປນີ້:
ຫຼັງຈາກການປິ່ນປົວ, ໃຫ້ເອົາຄູ່ສົ່ງທີ່ຕ້ອງການກວດສອບເຄື່ອງໝາຍຕາໜ່າງໃຫ້ເປັນສີທີ່ກົງກັນຂ້າມ, ແລະເອົາອັນໜຶ່ງເປັນສີໂປ່ງໃສ, ເພື່ອໃຫ້ເຫັນການເຄື່ອນໄຫວຂອງຕຳແໜ່ງຕາໜ່າງໃນຂະບວນການຈຳລອງແບບໄດນາມິກທັງໝົດໄດ້ຢ່າງຊັດເຈນ. ດັ່ງທີ່ສະແດງຢູ່ດ້ານລຸ່ມ:
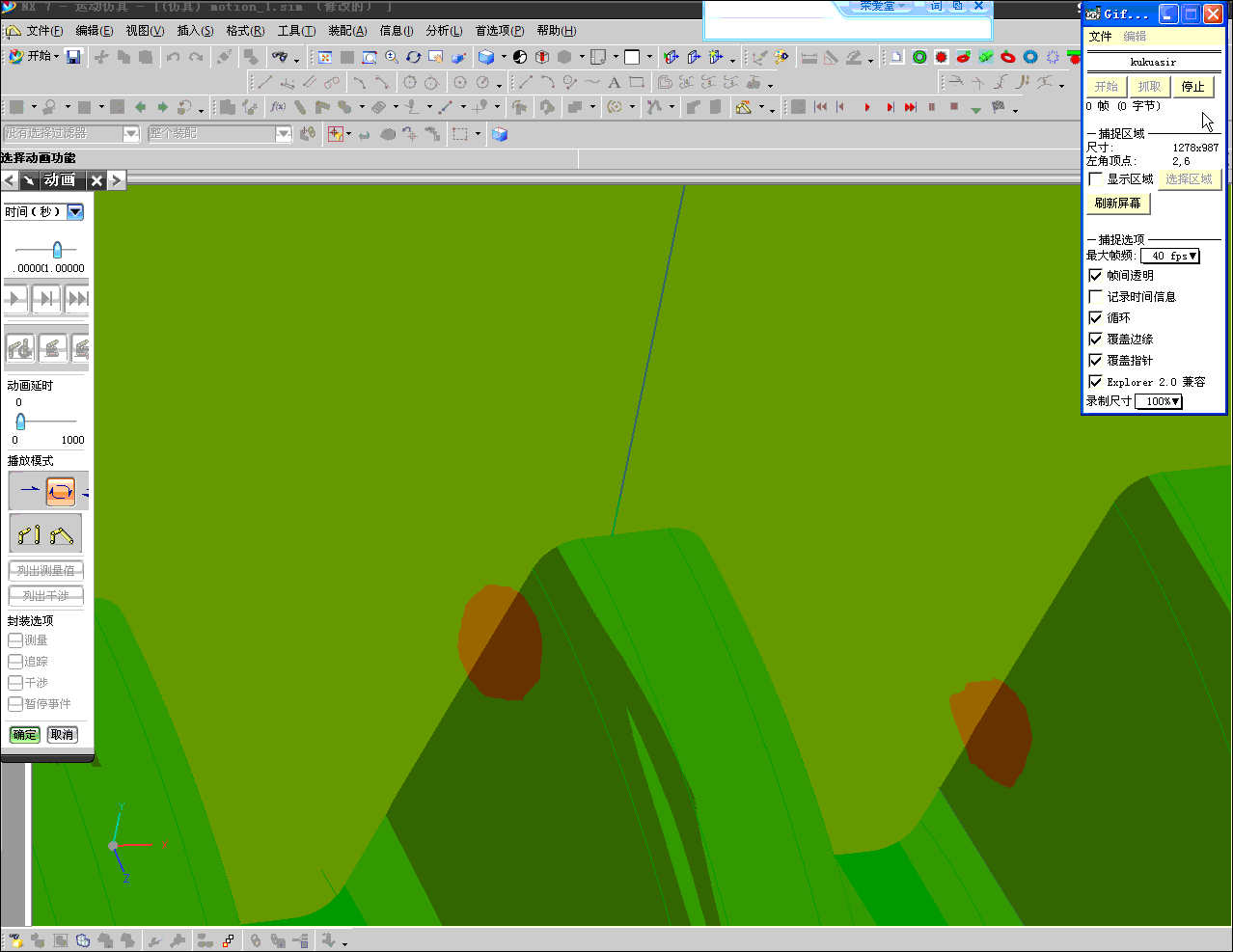
ໃນລະຫວ່າງການເຄື່ອນໄຫວຂອງຈຸດຕິດຕໍ່ຂອງຕາໜ່າງທີ່ມີສີກົງກັນຂ້າມທີ່ຊັດເຈນ, ສາມາດເຫັນໄດ້ວ່າມັນຜ່ານແຜ່ນປົກກະຕິ.
ບັນທຶກທີ່ຄິດໄລ່ໃນຕົວຢ່າງຂ້າງເທິງ:
ບັນທຶກການຄິດໄລ່ເບື້ອງຕົ້ນຂອງໜອນທີ່ມີເກຍ helical
ຂໍ້ມູນປ້ອນເຂົ້າ
ໂມດູນປົກກະຕິ: 6 ເສັ້ນຜ່າສູນກາງວົງມົນດັດຊະນີໜອນ: 5 ຈຳນວນຫົວໜອນ: 1 ຈຳນວນແຂ້ວເກຍແບບກ້ຽວວຽນ: 40
ມຸມຄວາມດັນປົກກະຕິ: ເກຍ helix 20 ມຸມ helix ທີ່ເລືອກໄວ້ລ່ວງໜ້າ: 6.89210257934639
ຂໍ້ມູນການຄິດໄລ່
ໂມດູນປົກກະຕິ: ຫົກ
ໂມດູນແກນ: ຫົກຮ້ອຍສີ່ພັນລ້ານສາມຮ້ອຍຫົກສິບເຈັດພັນສອງຮ້ອຍຊາວສາມລ້ານເກົ້າພັນສາມສິບຫ້າ
ມຸມເພີ່ມຂຶ້ນຂອງກະທູ້: 6.89210257934639
ທິດທາງຂອງກ້ຽວວຽນ: ເກຍໜອນ ແລະ ເກຍກ້ຽວວຽນຢູ່ໃນທິດທາງດຽວກັນ
ໄລຍະທາງສູນກາງຂອງການຍ້າຍສູນ: 14.5873444603807
ໄລຍະທາງສູນກາງຂອງຄູ່ສົ່ງຂໍ້ມູນເຂົ້າ: 14.75
ຈຳນວນແຂ້ວສະກູເທົ່າກັນ: 8.27311576399391
ມຸມຄວາມກົດດັນແກນຂອງໜອນ: 20.1339195068419
ຄ່າສຳປະສິດການບິດເບືອນແບບ radial ຂອງເກຍ helical: ສອງພັນເຈັດຮ້ອຍສິບເອັດ
ມຸມກ້ຽວວຽນຂອງໜອນ: 83.1078974206537
ພາລາມິເຕີພື້ນຖານຂອງໜອນ 83.10789742065361
ເສັ້ນຜ່າສູນກາງຂອງໜອນຫຼັກ: 6.2 ເສັ້ນຜ່າສູນກາງຂອງໜອນນ້ອຍ: 3.5 ຈຳນວນແຂ້ວໜອນ: 1
ໂມດູນປົກກະຕິຂອງໜອນ: 6 ມຸມຄວາມກົດດັນປົກກະຕິຂອງໜອນ: 20 ເສັ້ນຜ່າສູນກາງວົງມົນດັດຊະນີໜອນ: 5
ສຳປະສິດການຍ້າຍຮາກຂອງໜອນ: 0 ເສັ້ນຜ່າສູນກາງວົງມົນຂອງຖານໜອນ: 1.56559093858108
ໂມດູນປາຍໜອນ: ໂມດູນແກນໜອນ 5 ອັນ: ຫົກຮ້ອຍສີ່ພັນລ້ານສາມຮ້ອຍຫົກສິບເຈັດພັນສອງຮ້ອຍຊາວສາມລ້ານເກົ້າພັນສາມສິບຫ້າ
ມຸມຄວາມກົດດັນແກນຂອງໜອນ: 20.1339195068419 ມຸມຄວາມກົດດັນຂອງໜ້າໜອນ: 71.752752179164
ຄວາມໜາຂອງແຂ້ວປົກກະຕິຂອງວົງມົນດັດຊະນີໜອນ: 942477796076937 ການວັດແທກຄວາມສູງຂອງແຂ້ວຂອງວົງມົນດັດຊະນີໜອນ: ຫົກ
ມຸມເພີ່ມຂຶ້ນຂອງເສັ້ນດ້າຍວົງມົນດັດຊະນີໜອນ: 6.89210257934639 ມຸມກ້ຽວວຽນວົງມົນດັດຊະນີໜອນ: 83.1078974206537
ຄວາມຍາວຂອງແຂ້ວທີ່ມີປະສິດທິພາບຂອງໜອນ: 25
ສາຍ (ແກນ) ຂອງໜອນ: 1.89867562790706
ພາລາມິເຕີພື້ນຖານຂອງເກຍ helical
ເສັ້ນຜ່າສູນກາງຫຼັກຂອງເກຍຮຽວ: 25.7 ເສັ້ນຜ່າສູນກາງນ້ອຍຂອງເກຍຮຽວ: 23 ຈຳນວນແຂ້ວຂອງເກຍຮຽວ: 40
ໂມດູນປົກກະຕິຂອງເກຍ helical: ເກຍ helical 6 ມຸມຄວາມກົດດັນປົກກະຕິ: 20 ສຳປະສິດການດັດແປງເກຍ helical: ສອງພັນເຈັດຮ້ອຍສິບເອັດ
ເສັ້ນຜ່າສູນກາງວົງມົນຂອງເກຍ helical: 24.1746889207614 ເສັ້ນຜ່າສູນກາງວົງມົນຂອງເກຍ helical: 22.69738911811
ໂມດູນຂອງໜ້າເກຍແບບ helical: 604367223019035 ມຸມຄວາມດັນຂອງໜ້າເກຍແບບ helical: 20.1339195068419
ມຸມກ້ຽວວຽນຂອງວົງມົນດັດຊະນີເກຍກ້ຽວວຽນ: 6.89210257934639 ຄວາມກວ້າງຂອງເກຍກ້ຽວວຽນ: 10
ເກຍຮຽວ (ແກນ): 628.318530717958
ຈຳນວນແຂ້ວຂ້າມເສັ້ນປົກກະຕິທົ່ວໄປຂອງເກຍ helical: 5 ຄ່າທີ່ກຳນົດໄວ້ຂອງເສັ້ນປົກກະຕິທົ່ວໄປຂອງເກຍ helical: 8.42519
ຈຳນວນແຂ້ວຂ້າມເສັ້ນປົກກະຕິທົ່ວໄປຂອງເກຍ helical: 6 ຄ່າທີ່ກຳນົດໄວ້ຂອງເສັ້ນປົກກະຕິທົ່ວໄປຂອງເກຍ helical: 10.19647
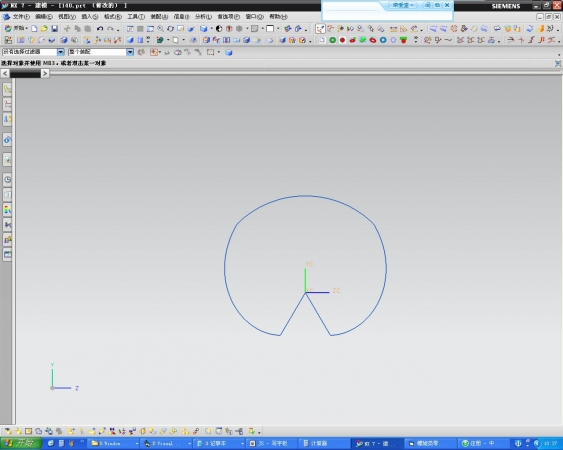
ແຜນວາດເສັ້ນໂຄ້ງໜ້າສຸດທ້າຍທີ່ໃຊ້ສຳລັບສ້າງແບບຈຳລອງໜອນແບບໂຄ້ງ:
ເວລາໂພສ: ມິຖຸນາ-11-2022