




ໃນຖານະເປັນກົນໄກການສົ່ງກຳລັງ, ເກຍດາວເຄາະຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນການປະຕິບັດວິສະວະກໍາຕ່າງໆ, ເຊັ່ນ: ເຄື່ອງຫຼຸດເກຍ, ເຄນ, ເຄື່ອງຫຼຸດເກຍດາວເຄາະ, ແລະອື່ນໆ. ສໍາລັບເຄື່ອງຫຼຸດເກຍດາວເຄາະ, ມັນສາມາດທົດແທນກົນໄກການສົ່ງກຳລັງຂອງລະບົບເກຍແກນຄົງທີ່ໃນຫຼາຍໆກໍລະນີ. ເນື່ອງຈາກວ່າຂະບວນການສົ່ງກຳລັງແມ່ນການຕິດຕໍ່ກັນເປັນສາຍ, ການເຊື່ອມໂຍງເປັນເວລາດົນຈະເຮັດໃຫ້ເກຍລົ້ມເຫຼວ, ສະນັ້ນມັນຈໍາເປັນຕ້ອງຈໍາລອງຄວາມແຂງແຮງຂອງມັນ. Li Hongli ແລະ ທີມງານໄດ້ໃຊ້ວິທີການເຊື່ອມໂຍງອັດຕະໂນມັດເພື່ອເຊື່ອມໂຍງເກຍດາວເຄາະ, ແລະໄດ້ເຫັນວ່າແຮງບິດແລະຄວາມກົດດັນສູງສຸດແມ່ນເສັ້ນຊື່. Wang Yanjun ແລະ ທີມງານຍັງໄດ້ເຊື່ອມໂຍງເກຍດາວເຄາະຜ່ານວິທີການຜະລິດອັດຕະໂນມັດ, ແລະຈໍາລອງສະຖິຕິແລະການຈໍາລອງແບບໂມດໍຂອງເກຍດາວເຄາະ. ໃນເອກະສານນີ້, ອົງປະກອບ tetrahedron ແລະ hexahedron ສ່ວນໃຫຍ່ແມ່ນໃຊ້ເພື່ອແບ່ງຕາໜ່າງ, ແລະຜົນໄດ້ຮັບສຸດທ້າຍໄດ້ຖືກວິເຄາະເພື່ອເບິ່ງວ່າເງື່ອນໄຂຄວາມແຂງແຮງແມ່ນບັນລຸຫຼືບໍ່.
1. ການສ້າງແບບຈຳລອງ ແລະ ການວິເຄາະຜົນໄດ້ຮັບ
ການສ້າງແບບຈຳລອງສາມມິຕິຂອງເກຍດາວເຄາະ
ເກຍດາວເຄາະສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍເກຍວົງແຫວນ, ເກຍດວງອາທິດ ແລະ ເກຍດາວເຄາະ. ພາລາມິເຕີຫຼັກທີ່ເລືອກໃນເອກະສານນີ້ແມ່ນ: ຈຳນວນແຂ້ວຂອງວົງແຫວນເກຍພາຍໃນແມ່ນ 66, ຈຳນວນແຂ້ວຂອງເກຍດວງອາທິດແມ່ນ 36, ຈຳນວນແຂ້ວຂອງເກຍດາວເຄາະແມ່ນ 15, ເສັ້ນຜ່າສູນກາງພາຍນອກຂອງວົງແຫວນເກຍພາຍໃນແມ່ນ 150 ມມ, ໂມດູລັດແມ່ນ 2 ມມ, ມຸມຄວາມກົດດັນແມ່ນ 20°, ຄວາມກວ້າງຂອງແຂ້ວແມ່ນ 20 ມມ, ຄ່າສຳປະສິດຄວາມສູງເພີ່ມເຕີມແມ່ນ 1, ຄ່າສຳປະສິດການຕໍ່ຕ້ານແມ່ນ 0.25, ແລະ ມີເກຍດາວເຄາະສາມອັນ.
ການວິເຄາະການຈຳລອງແບບຄົງທີ່ຂອງເກຍດາວເຄາະ
ກຳນົດຄຸນສົມບັດຂອງວັດສະດຸ: ນຳເຂົ້າລະບົບເກຍດາວເຄາະສາມມິຕິທີ່ແຕ້ມໃນຊອບແວ UG ເຂົ້າໃນ ANSYS, ແລະ ຕັ້ງຄ່າພາລາມິເຕີຂອງວັດສະດຸ, ດັ່ງທີ່ສະແດງຢູ່ໃນຕາຕະລາງທີ 1 ຂ້າງລຸ່ມນີ້:

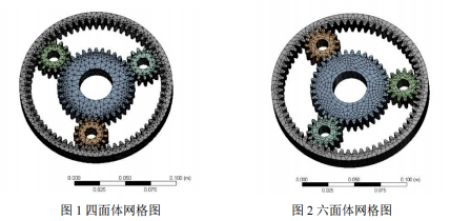
ການສ້າງຕາໜ່າງ: ຕາໜ່າງອົງປະກອບຈຳກັດຖືກແບ່ງອອກໂດຍຮູບສີ່ຫຼ່ຽມມຸມສາກ ແລະ ຮູບຫົກຫຼ່ຽມມຸມສາກ, ແລະ ຂະໜາດພື້ນຖານຂອງອົງປະກອບແມ່ນ 5 ມມ. ເນື່ອງຈາກວ່າເກຍດາວເຄາະ, ເກຍແສງຕາເວັນ ແລະ ວົງແຫວນເກຍພາຍໃນຢູ່ໃນການຕິດຕໍ່ ແລະ ເປັນຕາໜ່າງ, ຕາໜ່າງຂອງສ່ວນຕິດຕໍ່ ແລະ ຕາໜ່າງມີຄວາມໜາແໜ້ນ, ແລະ ຂະໜາດແມ່ນ 2 ມມ. ກ່ອນອື່ນໝົດ, ຕາຂ່າຍສີ່ຫຼ່ຽມຖືກນຳໃຊ້, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 1. ມີການສ້າງອົງປະກອບທັງໝົດ 105906 ອົງປະກອບ ແລະ 177893 ໂຫນດ. ຫຼັງຈາກນັ້ນ, ຕາຂ່າຍຫົກຫຼ່ຽມຖືກນຳໃຊ້, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 2, ແລະ ມີການສ້າງເຊວທັງໝົດ 26957 ເຊວ ແລະ 140560 ໂຫນດ.
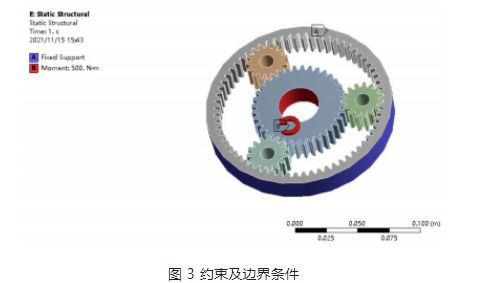
ເງື່ອນໄຂການໃຊ້ງານ ແລະ ຂອບເຂດການຮັບນ້ຳໜັກ: ອີງຕາມລັກສະນະການເຮັດວຽກຂອງເກຍດາວເຄາະໃນຕົວຫຼຸດກຳລັງ, ເກຍດວງອາທິດແມ່ນເກຍຂັບເຄື່ອນ, ເກຍດາວເຄາະແມ່ນເກຍຂັບເຄື່ອນ, ແລະ ຜົນຜະລິດສຸດທ້າຍແມ່ນຜ່ານຕົວນຳດາວເຄາະ. ຕິດຕັ້ງວົງແຫວນເກຍພາຍໃນໃນ ANSYS, ແລະ ໃຊ້ແຮງບິດ 500N · m ໃສ່ເກຍດວງອາທິດ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 3.
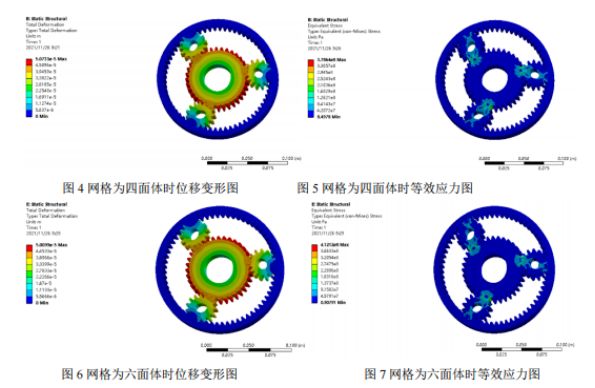
ການປະມວນຜົນຫຼັງການປະມວນຜົນ ແລະ ການວິເຄາະຜົນໄດ້ຮັບ: ຕາຕະລາງການຍົກຍ້າຍຂອງ nephogram ແລະ ຕາຕະລາງຄວາມຄຽດທຽບເທົ່າຂອງການວິເຄາະສະຖິດທີ່ໄດ້ມາຈາກການແບ່ງຕາຂ່າຍສອງຢ່າງແມ່ນໄດ້ລະບຸໄວ້ຂ້າງລຸ່ມນີ້, ແລະ ການວິເຄາະປຽບທຽບແມ່ນໄດ້ດຳເນີນການ. ຈາກຕາຕະລາງການຍົກຍ້າຍຂອງຕາຂ່າຍສອງປະເພດ, ພົບວ່າການຍົກຍ້າຍສູງສຸດເກີດຂຶ້ນຢູ່ຕຳແໜ່ງທີ່ເກຍດວງອາທິດບໍ່ຕິດກັບເກຍດາວເຄາະ, ແລະ ຄວາມຄຽດສູງສຸດເກີດຂຶ້ນຢູ່ຮາກຂອງຕາຂ່າຍເກຍ. ຄວາມຄຽດສູງສຸດຂອງຕາຂ່າຍ tetrahedral ແມ່ນ 378MPa, ແລະ ຄວາມຄຽດສູງສຸດຂອງຕາຂ່າຍ hexahedral ແມ່ນ 412MPa. ເນື່ອງຈາກຂີດຈຳກັດຜົນຜະລິດຂອງວັດສະດຸແມ່ນ 785MPa ແລະ ປັດໄຈຄວາມປອດໄພແມ່ນ 1.5, ຄວາມຄຽດທີ່ອະນຸຍາດແມ່ນ 523MPa. ຄວາມຄຽດສູງສຸດຂອງທັງສອງຜົນໄດ້ຮັບແມ່ນໜ້ອຍກວ່າຄວາມຄຽດທີ່ອະນຸຍາດ, ແລະ ທັງສອງຕອບສະໜອງເງື່ອນໄຂຄວາມແຂງແຮງ.
2. ສະຫຼຸບ
ຜ່ານການຈຳລອງອົງປະກອບຈຳກັດຂອງເກຍດາວເຄາະ, ຕາຕະລາງການຜິດຮູບແບບການຍ້າຍຖິ່ນຖານ ແລະ ຕາຕະລາງຄວາມກົດດັນທຽບເທົ່າຂອງລະບົບເກຍແມ່ນໄດ້ຮັບ, ເຊິ່ງຂໍ້ມູນສູງສຸດ ແລະ ຕ່ຳສຸດ ພ້ອມທັງການແຈກຢາຍຂອງພວກມັນໃນເກຍດາວເຄາະສາມາດພົບຮູບແບບໄດ້. ສະຖານທີ່ຂອງຄວາມກົດດັນທຽບເທົ່າສູງສຸດຍັງເປັນສະຖານທີ່ທີ່ແຂ້ວເກຍມີແນວໂນ້ມທີ່ຈະລົ້ມເຫຼວຫຼາຍທີ່ສຸດ, ສະນັ້ນຄວນເອົາໃຈໃສ່ເປັນພິເສດໃນລະຫວ່າງການອອກແບບ ຫຼື ການຜະລິດ. ຜ່ານການວິເຄາະລະບົບເກຍດາວເຄາະທັງໝົດ, ຄວາມຜິດພາດທີ່ເກີດຈາກການວິເຄາະແຂ້ວເກຍພຽງອັນດຽວຈະຖືກແກ້ໄຂ.
ເວລາໂພສ: ວັນທີ 28 ທັນວາ 2022