




ກລີສັນເກຍກ້ຽວວຽນເປັນເກຍ bevel ປະເພດພິເສດທີ່ຖືກອອກແບບມາເພື່ອສົ່ງກຳລັງລະຫວ່າງເພົາທີ່ຕັດກັນ, ໂດຍປົກກະຕິແລ້ວຢູ່ທີ່ມຸມ 90 ອົງສາ. ສິ່ງທີ່ເຮັດໃຫ້ລະບົບ Gleason ແຕກຕ່າງແມ່ນຮູບຮ່າງແຂ້ວທີ່ເປັນເອກະລັກ ແລະ ວິທີການຜະລິດ, ເຊິ່ງໃຫ້ການເຄື່ອນທີ່ທີ່ລຽບງ່າຍ, ຄວາມສາມາດໃນການບິດສູງ, ແລະ ການເຮັດວຽກທີ່ງຽບສະຫງົບ. ເກຍເຫຼົ່ານີ້ຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງໃນລະບົບສົ່ງກຳລັງລົດຍົນ, ອຸດສາຫະກຳ, ແລະ ການບິນອະວະກາດ ບ່ອນທີ່ຄວາມໜ້າເຊື່ອຖື ແລະ ຄວາມແມ່ນຍຳແມ່ນສຳຄັນຫຼາຍ.
ລະບົບ Gleason ໄດ້ຖືກພັດທະນາເພື່ອປັບປຸງລະບົບຊື່ ແລະເກຍເບວ zerolໂດຍການນຳໃຊ້ແຂ້ວຮູບຊົງໂຄ້ງ. ຮູບແບບກ້ຽວວຽນນີ້ຊ່ວຍໃຫ້ການເຊື່ອມຕໍ່ລະຫວ່າງແຂ້ວຄ່ອຍໆດີຂຶ້ນ, ຫຼຸດຜ່ອນສຽງລົບກວນ ແລະ ການສັ່ນສະເທືອນໄດ້ຢ່າງຫຼວງຫຼາຍ ໃນຂະນະທີ່ຊ່ວຍໃຫ້ຄວາມໄວໃນການໝູນ ແລະ ຄວາມສາມາດໃນການໂຫຼດສູງຂຶ້ນ. ການອອກແບບຍັງຊ່ວຍເພີ່ມອັດຕາສ່ວນການຕິດຕໍ່ ແລະ ຄວາມແຂງແຮງຂອງພື້ນຜິວ, ຮັບປະກັນການສົ່ງພະລັງງານທີ່ມີປະສິດທິພາບພາຍໃຕ້ການໂຫຼດໜັກ ຫຼື ໄດນາມິກ.
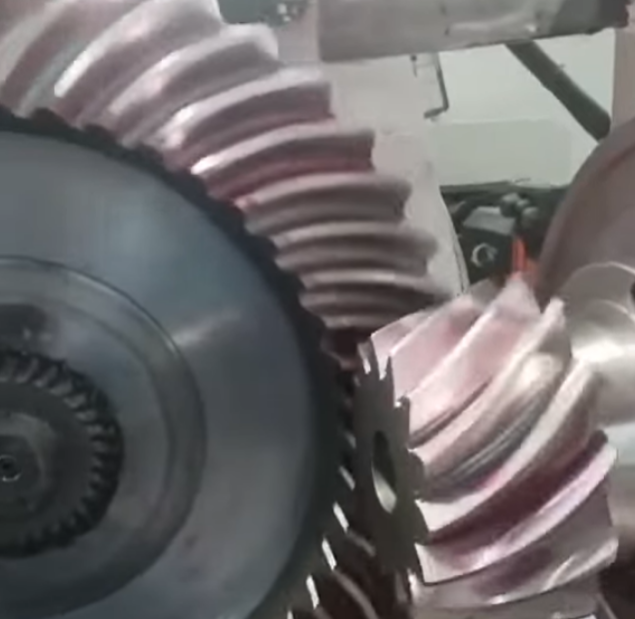
ເກຍກ້ຽວວຽນ Gleason ແຕ່ລະຄູ່ປະກອບດ້ວຍ pinion ແລະເກຍຄູ່, ຜະລິດດ້ວຍຮູບຮ່າງທີ່ກົງກັນ. ຂະບວນການຜະລິດແມ່ນມີຄວາມຊ່ຽວຊານສູງ. ມັນເລີ່ມຕົ້ນດ້ວຍການຕີ ຫຼື ການຫລໍ່ໂລຫະປະສົມທີ່ມີຄວາມແມ່ນຍຳສູງ, ເຊັ່ນ 18CrNiMo7-6, ຕາມດ້ວຍການຕັດຫຍາບ, ການເຈາະ, ຫຼື ການປັ້ນເພື່ອສ້າງຮູບແບບເກຍເບື້ອງຕົ້ນ. ວິທີການທີ່ກ້າວໜ້າເຊັ່ນ: ການເຄື່ອງຈັກ 5 ແກນ, ການແກະສະຫຼັກ, ແລະ ການຕັດແຂງຮັບປະກັນຄວາມແມ່ນຍຳຂອງມິຕິສູງ ແລະ ການສຳເລັດຮູບພື້ນຜິວທີ່ດີທີ່ສຸດ. ຫຼັງຈາກການປະຕິບັດຄວາມຮ້ອນເຊັ່ນ: ການເຄືອບດ້ວຍຄາບູໄຣເຊຊັນ (58–60 HRC), ເກຍຈະຜ່ານການຂັດ ຫຼື ການບົດເພື່ອໃຫ້ໄດ້ການປະສານທີ່ສົມບູນແບບລະຫວ່າງ pinion ແລະ ເກຍ.
ຮູບຮ່າງເລຂາຄະນິດຂອງເກຍກ້ຽວວຽນ Gleason ຖືກກຳນົດໂດຍຕົວກຳນົດທີ່ສຳຄັນຫຼາຍຢ່າງຄື: ມຸມກ້ຽວວຽນ, ມຸມຄວາມດັນ, ໄລຍະຫ່າງຂອງໂກນ pitch, ແລະ ຄວາມກວ້າງຂອງໜ້າເກຍ. ຕົວກຳນົດເຫຼົ່ານີ້ຖືກຄິດໄລ່ຢ່າງແນ່ນອນເພື່ອຮັບປະກັນຮູບແບບການສຳຜັດຂອງແຂ້ວ ແລະ ການແຈກຢາຍນ້ຳໜັກທີ່ຖືກຕ້ອງ. ໃນລະຫວ່າງການກວດກາຄັ້ງສຸດທ້າຍ, ເຄື່ອງມືເຊັ່ນ: ເຄື່ອງວັດແທກພິກັດ (CMM) ແລະ ການວິເຄາະການສຳຜັດຂອງແຂ້ວ (TCA) ຈະກວດສອບວ່າຊຸດເກຍຕອບສະໜອງລະດັບຄວາມແມ່ນຍຳ DIN 6 ຫຼື ISO 1328-1 ທີ່ຕ້ອງການ.

ໃນການດໍາເນີນງານ, ກ້ຽວວຽນ Gleasonເກຍ bevelໃຫ້ປະສິດທິພາບສູງ ແລະ ປະສິດທິພາບທີ່ໝັ້ນຄົງເຖິງແມ່ນວ່າຢູ່ພາຍໃຕ້ເງື່ອນໄຂທີ່ຕ້ອງການຫຼາຍ. ແຂ້ວໂຄ້ງໃຫ້ການຕິດຕໍ່ຢ່າງຕໍ່ເນື່ອງ, ຫຼຸດຜ່ອນຄວາມເຂັ້ມຂຸ້ນຂອງຄວາມກົດດັນ ແລະ ການສວມໃສ່. ສິ່ງນີ້ເຮັດໃຫ້ພວກມັນເໝາະສຳລັບດິຟເຟີເຣນຊຽລລົດຍົນ, ກ່ອງເກຍລົດບັນທຸກ, ເຄື່ອງຈັກໜັກ, ລະບົບຂັບເຄື່ອນທາງທະເລ, ແລະ ເຄື່ອງມືໄຟຟ້າ. ນອກຈາກນັ້ນ, ຄວາມສາມາດໃນການປັບແຕ່ງຮູບຮ່າງຂອງແຂ້ວ ແລະ ໄລຍະການຕິດຕັ້ງຊ່ວຍໃຫ້ວິສະວະກອນສາມາດເພີ່ມປະສິດທິພາບການອອກແບບສຳລັບແຮງບິດ, ຄວາມໄວ, ແລະ ຂໍ້ຈຳກັດດ້ານພື້ນທີ່ສະເພາະ.
ເກຍມຸມກ້ຽວວຽນແບບ Gleason — ຕາຕະລາງຄິດໄລ່ທີ່ສຳຄັນ
| ລາຍການ | ສູດ / ສຳນວນ | ຕົວແປ / ໝາຍເຫດ |
|---|---|---|
| ພາລາມິເຕີການປ້ອນຂໍ້ມູນ | (z_1,\ z_2,\ m_n,\ \alpha_n,\ \Sigma,\ b,\ T) | ແຂ້ວ pinion/ເກຍ (z); ໂມດູນປົກກະຕິ (m_n); ມຸມຄວາມດັນປົກກະຕິ (\alpha_n); ມຸມເພົາ (\Sigma); ຄວາມກວ້າງຂອງໜ້າ (b); ແຮງບິດສົ່ງຕໍ່ (T). |
| ເສັ້ນຜ່າສູນກາງອ້າງອີງ (ສະເລ່ຍ) | (d_i = z_i, m_n) | i = 1 (ປີນຽນ), 2 (ເກຍ). ເສັ້ນຜ່າສູນກາງສະເລ່ຍ/ເສັ້ນຜ່າສູນກາງອ້າງອີງໃນພາກສ່ວນປົກກະຕິ. |
| ມຸມຂອງມຸມໂກນ (ມຸມຂອງມຸມໂກນ) | (\delta_1,\ \delta_2) ເຊັ່ນວ່າ (\delta_1+\delta_2=\Sigma) ແລະ (\dfrac{\sin\delta_1}{d_1}=\dfrac{\sin\delta_2}{d_2}) | ແກ້ຫາມຸມໂກນທີ່ສອດຄ່ອງກັບສັດສ່ວນຂອງແຂ້ວ ແລະ ມຸມຂອງເພົາ. |
| ໄລຍະຫ່າງຂອງໂກນ (ໄລຍະຫ່າງຂອງຈຸດສູງສຸດຂອງມຸມ) | (R = \dfrac{d_1}{2\sin\delta_1} = \dfrac{d_2}{2\sin\delta_2}) | ໄລຍະຫ່າງຈາກຈຸດສູງສຸດຂອງໂກນຫາວົງມົນ pitch ຖືກວັດແທກຕາມ generatrix. |
| ມຸມວົງມົນ (ປົກກະຕິ) | (p_n = \pi m_n) | ຄວາມສູງເສັ້ນຊື່ຢູ່ພາກສ່ວນປົກກະຕິ. |
| ໂມດູນທາງຂວາງ (ປະມານ) | (m_t = \dfrac{m_n}{\cos\beta_n}) | (\beta_n) = ມຸມກ້ຽວວຽນປົກກະຕິ; ປ່ຽນລະຫວ່າງພາກສ່ວນປົກກະຕິ ແລະ ພາກສ່ວນຕາມຂວາງຕາມຄວາມຕ້ອງການ. |
| ມຸມກ້ຽວວຽນ (ຄວາມສຳພັນສະເລ່ຍ/ທາງຂວາງ) | (\tan\beta_t = \tan\beta_n \cos\delta_m) | (\delta_m) = ມຸມໂກນສະເລ່ຍ; ໃຊ້ການຫັນປ່ຽນລະຫວ່າງມຸມປົກກະຕິ, ມຸມຂວາງ, ແລະ ມຸມກ້ຽວວຽນສະເລ່ຍ. |
| ຄຳແນະນຳກ່ຽວກັບຄວາມກວ້າງຂອງໃບໜ້າ | (b = k_b, m_n) | (k_b) ໂດຍປົກກະຕິແລ້ວຈະເລືອກຕັ້ງແຕ່ 8 ຫາ 20 ຂຶ້ນກັບຂະໜາດ ແລະ ການນຳໃຊ້; ປຶກສາການອອກແບບສຳລັບຄ່າທີ່ແນ່ນອນ. |
| ພາກຜະນວກ (ສະເລ່ຍ) | (ປະມານ m_n) | ການປະມານຄ່າເພີ່ມເຕີມຄວາມເລິກເຕັມມາດຕະຖານ; ໃຊ້ຕາຕະລາງອັດຕາສ່ວນແຂ້ວທີ່ແນ່ນອນສຳລັບຄ່າທີ່ແນ່ນອນ. |
| ເສັ້ນຜ່າສູນກາງພາຍນອກ (ປາຍ) | (d_{o,i} = d_i + 2a) | i = 1,2 |
| ເສັ້ນຜ່າສູນກາງຂອງຮາກ | (d_{f,i} = d_i – 2h_f) | (h_f) = dedendum (ຈາກອັດຕາສ່ວນລະບົບເກຍ). |
| ຄວາມໜາຂອງແຂ້ວວົງກົມ (ປະມານ) | (s \approx \dfrac{\pi m_n}{2}) | ສຳລັບຮູບຮ່າງມຸມອຽງ ໃຫ້ໃຊ້ຄວາມໜາທີ່ຖືກແກ້ໄຂຈາກຕາຕະລາງແຂ້ວເພື່ອຄວາມແມ່ນຍຳ. |
| ແຮງຕັ້ງສາກຢູ່ວົງມົນ pitch | (F_t = \dfrac{2T}{d_p}) | (T) = ແຮງບິດ; (d_p) = ເສັ້ນຜ່າສູນກາງຂອງ pitch (ໃຊ້ຫົວໜ່ວຍທີ່ສອດຄ່ອງກັນ). |
| ຄວາມກົດດັນການບິດງໍ (ງ່າຍດາຍ) | (\sigma_b = \dfrac{F_t \cdot K_O \cdot K_V}{b \cdot m_n \cdot Y}) | (K_O) = ຕົວຄູນການໂຫຼດເກີນ, (K_V) = ຕົວຄູນໄດນາມິກ, (Y) = ຕົວຄູນຮູບຮ່າງ (ຮູບຮ່າງໂຄ້ງ). ໃຊ້ສົມຜົນການໂຄ້ງ AGMA/ISO ເຕັມຮູບແບບສຳລັບການອອກແບບ. |
| ຄວາມກົດດັນຕໍ່ການຕິດຕໍ່ (ປະເພດເຮີດຊ໌, ແບບງ່າຍ) | (\sigma_H = C_H \sqrt{\dfrac{F_t}{d_p, b} \cdot \dfrac{1}{\frac{1-\nu_1^2}{E_1}+\frac{1-\nu_2^2}{E_2}}) | (C_H) ຄ່າຄົງທີ່ເລຂາຄະນິດ, (E_i,\nu_i) ໂມດູລີຍືດหยุ่นຂອງວັດສະດຸ ແລະ ອັດຕາສ່ວນ Poisson. ໃຊ້ສົມຜົນການສຳຜັດ-ຄວາມກົດດັນເຕັມຮູບແບບເພື່ອການກວດສອບ. |
| ອັດຕາສ່ວນການຕິດຕໍ່ (ທົ່ວໄປ) | (\varepsilon = \dfrac{\text{arc of action}}{\text{base pitch}}) | ສຳລັບເກຍ bevel ໃຫ້ຄິດໄລ່ໂດຍໃຊ້ຮູບຮ່າງຂອງ pitch cone ແລະ ມຸມກ້ຽວວຽນ; ໂດຍປົກກະຕິແລ້ວຈະປະເມີນດ້ວຍຕາຕະລາງອອກແບບເກຍ ຫຼື ຊອບແວ. |
| ຈຳນວນແຂ້ວແບບເສມືນ | (z_v \approx \dfrac{d}{m_t}) | ເປັນປະໂຫຍດສຳລັບການກວດສອບການຕິດຕໍ່/ການຕັດດ້ານລຸ່ມ; (m_t) = ໂມດູນທາງຂວາງ. |
| ການກວດສອບແຂ້ວ / ການຕັດຕ່ຳສຸດ | ໃຊ້ສະພາບແຂ້ວຂັ້ນຕ່ຳໂດຍອີງໃສ່ມຸມກ້ຽວວຽນ, ມຸມຄວາມດັນ ແລະ ສັດສ່ວນຂອງແຂ້ວ | ຖ້າ (z) ຕໍ່າກວ່າຕໍ່າສຸດ, ຕ້ອງມີການຕັດຕ່ຳກວ່າ ຫຼື ເຄື່ອງມືພິເສດ. |
| ການຕັ້ງຄ່າເຄື່ອງຈັກ/ເຄື່ອງຕັດ (ຂັ້ນຕອນການອອກແບບ) | ກຳນົດມຸມຫົວຕັດ, ການໝຸນຂອງບ່ອນວາງ ແລະ ການຈັດດັດຊະນີຈາກຮູບຮ່າງຂອງລະບົບເກຍ | ການຕັ້ງຄ່າເຫຼົ່ານີ້ແມ່ນໄດ້ມາຈາກຮູບຮ່າງເກຍ ແລະ ລະບົບເຄື່ອງຕັດ; ປະຕິບັດຕາມຂັ້ນຕອນເຄື່ອງຈັກ/ເຄື່ອງມື. |
ເຕັກໂນໂລຊີການຜະລິດທີ່ທັນສະໄໝ, ເຊັ່ນ: ເຄື່ອງຕັດ ແລະ ເຄື່ອງບົດເກຍ CNC bevel, ຮັບປະກັນຄຸນນະພາບທີ່ສະໝໍ່າສະເໝີ ແລະ ຄວາມສາມາດໃນການແລກປ່ຽນກັນໄດ້. ໂດຍການເຊື່ອມໂຍງການອອກແບບດ້ວຍຄອມພິວເຕີ (CAD) ແລະ ການຈຳລອງ, ຜູ້ຜະລິດສາມາດປະຕິບັດວິສະວະກຳແບບປີ້ນກັບກັນ ແລະ ການທົດສອບແບບເສມືນກ່ອນການຜະລິດຕົວຈິງ. ສິ່ງນີ້ຊ່ວຍຫຼຸດຜ່ອນເວລານຳ ແລະ ຄ່າໃຊ້ຈ່າຍ ພ້ອມທັງປັບປຸງຄວາມແມ່ນຍຳ ແລະ ຄວາມໜ້າເຊື່ອຖື.

ສະຫຼຸບແລ້ວ, ເກຍ Gleason ແບບກ້ຽວວຽນເປັນຕົວແທນຂອງການປະສົມປະສານທີ່ສົມບູນແບບຂອງຮູບຮ່າງທີ່ກ້າວໜ້າ, ຄວາມແຂງແຮງຂອງວັດສະດຸ, ແລະ ຄວາມແມ່ນຍຳໃນການຜະລິດ. ຄວາມສາມາດໃນການສົ່ງກຳລັງທີ່ລຽບງ່າຍ, ມີປະສິດທິພາບ, ແລະ ທົນທານຂອງພວກມັນໄດ້ເຮັດໃຫ້ພວກມັນເປັນອົງປະກອບທີ່ຂາດບໍ່ໄດ້ໃນລະບົບຂັບເຄື່ອນທີ່ທັນສະໄໝ. ບໍ່ວ່າຈະໃຊ້ໃນຂະແໜງຍານຍົນ, ອຸດສາຫະກຳ, ຫຼື ການບິນອະວະກາດ, ເກຍເຫຼົ່ານີ້ຍັງສືບຕໍ່ກຳນົດຄວາມເປັນເລີດໃນການເຄື່ອນໄຫວ ແລະ ປະສິດທິພາບທາງກົນຈັກ.
ເວລາໂພສ: ຕຸລາ-24-2025